Human Mesh Recovery
Results of human mesh recovery on Internet videos.
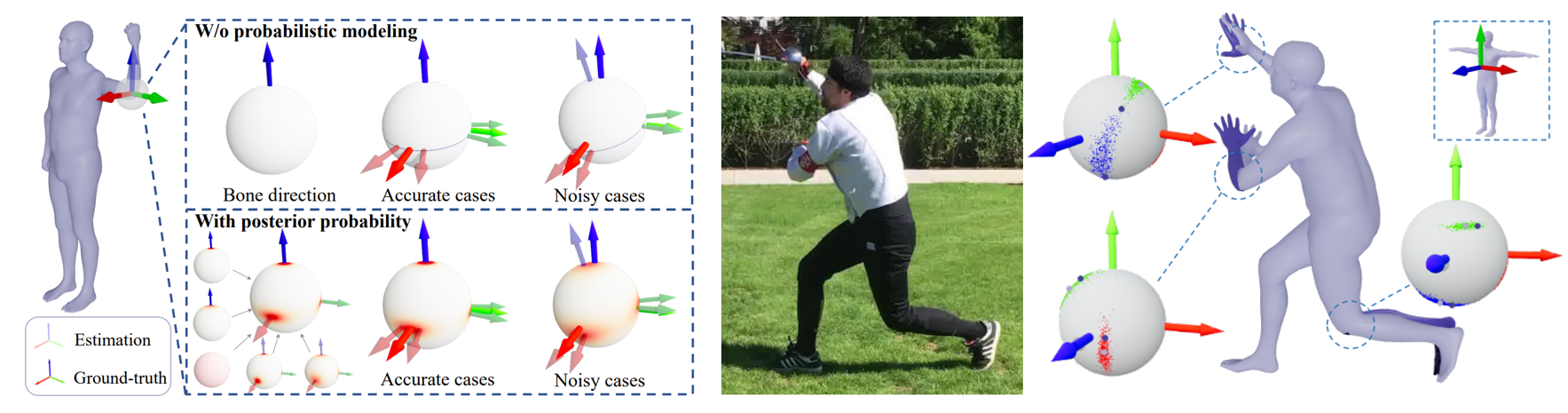
Despite various probabilistic methods for modeling the uncertainty and ambiguity in human mesh recovery, their overall precision is limited because existing formulations for joint rotations are either not constrained to SO(3) or difficult to learn for neural networks. To address such an issue, we derive a novel analytical formulation for learning posterior probability distributions of human joint rotations conditioned on bone directions in a Bayesian manner, and based on this, we propose a new posterior-guided framework for human mesh recovery. We demonstrate that our framework is not only superior to existing SOTA baselines on multiple benchmarks but also flexible enough to seamlessly incorporate with additional sensors due to its Bayesian nature.
Results of human mesh recovery on Internet videos.
Results of fusing IMUs and a camera.
@inproceedings{fang2023propose,
title = {Learning Analytical Posterior Probability for Human Mesh Recovery},
author = {Fang, Qi and Chen, Kang and Fan, Yinghui and Shuai, Qing and Li, Jiefeng and Zhang, Weidong},
booktitle = {CVPR},
year = {2023},
}